
Blog
Algoritmo sofisticado de planificación de rutas para robots móviles
Imagina cientos de aviones totalmente autónomos intentando despegar y aterrizar en un pequeño aeropuerto con solo unas pocas terminales. A cada avión se le asigna la tarea de recoger y dejar pasajeros en un lugar concreto dentro de un estrecho margen de tiempo, minimizando al mismo tiempo la distancia recorrida por la pista y entre las terminales.
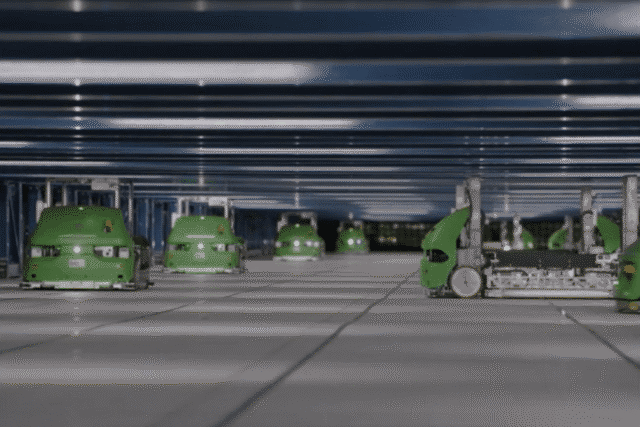
De forma similar, los robots autónomos del sistema Symbotic deben desplazarse por un espacio compartido denominado «plataforma de transferencia», con sus vías de acceso y pasillos, para recoger y entregar maletas dentro de esta estructura de alta densidad. Un algoritmo de rutas propio permite que cientos de robots, que se desplazan a una velocidad de hasta más de veinte millas por hora, realicen esta tarea de forma rápida y eficiente sin chocar ni retrasar a otros robots mientras ejecutan sus tareas.
El algoritmo de enrutamiento calcula una ruta óptima para cada robot con el fin de maximizar la eficiencia general del sistema y minimizar las paradas y arranques que provocan pérdida de energía y un desgaste excesivo del robot.
El algoritmo de rutas funciona en combinación con un algoritmo de asignación de cajas. Juntos tienen en cuenta la ubicación de cada caja, las fechas de caducidad de los productos y la sincronización y secuencia del pedido, así como otros numerosos factores que influyen en la eficiencia de la preparación de pedidos, entre ellos el tiempo y la distancia de desplazamiento de los robots, los patrones de tráfico y la congestión en los pasillos y las vías de acceso.
El algoritmo de rutas explora todas las combinaciones de rutas posibles para cada robot y coordina toda la flota de robots en paralelo. Asigna a cada robot la ejecución de una acción de recogida/colocación basándose en la ruta más óptima, eliminando aquellas que entran en conflicto con otros robots o que suboptimizan el sistema en su conjunto. Y todo ello lo hace en tiempo real mediante comunicaciones de baja latencia, de modo que los robots pueden ejecutar sus tareas a una velocidad líder en el sector.
El algoritmo coordina el trabajo de tal forma que los robots autónomos parecen evitar chocar entre sí sin esfuerzo alguno y el conjunto parece una danza coreografiada. Se trata de la vanguardia de la reserva espaciotemporal y la optimización combinatoria.
El algoritmo de enrutamiento es uno de los avances tecnológicos fundamentales que abre la puerta a futuras mejoras de productividad para los robots móviles y para el sistema Symbotic en su conjunto.
El algoritmo de enrutamiento de Symbotic ya ha permitido, hasta la fecha, una mejora de la productividad del 20-25 % en el sistema. Las mejoras adicionales permitirán a los clientes aumentar la capacidad de rendimiento. Y los ingenieros de Symbotic siguen ampliando los límites de lo posible.
Actualizado: