Blog
El cuello de botella del almacenamiento de alta densidad no es el rendimiento de los robots, sino el tráfico.
Por James Kuffner, director tecnológico de Symbotic
Los centros de distribución son el corazón de la cadena de suministro. A medida que la IA física transforma la forma en que las mercancías se mueven por la red, el almacén del futuro se está convirtiendo en algo más que un conjunto de máquinas rápidas: es una inteligencia única y cohesionada. El «cerebro» central de ese sistema no es ningún robot en concreto, sino la capa de orquestación que coordina flotas enteras en tiempo real.
Cuando hablamos de automatización de almacenes, a menudo nos fijamos en las especificaciones de cada robot: cajas por hora, capacidad de carga, precisión de colocación, velocidades máximas. Esas métricas son importantes. Pero en los sistemas modernos de surtido de alta densidad, la métrica que realmente determina el rendimiento rara vez es la velocidad a la que se mueve un solo robot. Más bien, se trata de lo bien que una flota de robots —que a menudo supera con creces el millar— coordina sus movimientos mientras se desplazan juntos en un espacio finito y compartido.
En otras palabras, el cuello de botella en la eficiencia de la automatización no es el robot. Es el tráfico.
Esta distinción cobra más importancia cada año, a medida que queda claro que el futuro del surtido automatizado pasa por el almacenamiento denso y los sistemas compactos.
La economía exige un almacenamiento denso. Los clientes de Symbotic quieren más capacidad dentro de la superficie de sus almacenes actuales. Quieren evitar los costos de nuevas construcciones. Quieren que sus mercancías de máxima prioridad sigan las rutas más cortas posibles. Nuestra plataforma se ha diseñado pensando en ese futuro, ya que permite más almacenamiento por pie cúbico, más flexibilidad por robot y más trabajo realizado en menos espacio.
Pero la densidad conlleva una importante contrapartida. Cuanto más densamente se llena un almacén, menos espacio tienen los robots para desplazarse —y más crítica se vuelve la capa de coordinación de la flota—. Aquí es donde la IA física hace honor a su nombre: no en el movimiento mecánico de un único activo, sino en la inteligencia y la capacidad de acción de un sistema que percibe, planifica y se adapta a través de cientos de piezas en movimiento.
Qué significa realmente la coordinación a escala de flota
En una implementación madura de Symbotic, cada robot móvil autónomo SymBot® puede recorrer hasta 50 millas al día. En unas instalaciones de gran tamaño, más de 1.500 SymBots mueven cientos de miles de cajas a lo largo de numerosos niveles de almacenamiento, con más de 100 robots activos en cada nivel. A medida que llegan los pedidos de salida, el sistema tiene que decidir en tiempo real dónde almacenar cada caja, qué robot debe recogerla, cuáles son las cajas prioritarias entre todas las que hay y la ruta óptima que debe seguir cada robot, todo ello garantizando que no se produzcan colisiones ni atascos.
Entre las variables de la ubicación de almacenamiento, la asignación de tareas y la planificación de rutas, un sistema de gestión de flotas puede tomar cuatrillones de decisiones cada día. En el caso del software de gestión de flotas de Symbotic, se evalúan miles de millones de esas posibilidades cada segundo, a través de cientos de núcleos de la Unidad Central de Procesamiento (CPU) que funcionan en paralelo y replanean la ruta aproximadamente cada cinco segundos.
La versión clásica de este problema en informática —la búsqueda óptima de rutas para múltiples agentes (MAPF)— es NP-difícil. En términos sencillos, esto significa que, a gran escala, probablemente sea imposible resolver este problema de forma óptima. Incluso con hardware avanzado, lo mejor que se puede hacer es intentar calcular rápidamente soluciones subóptimas de alta calidad.
La cuestión es que se trata de un reto de ingeniería muy diferente al de hacer que los robots individuales se muevan más rápido. Es un problema de escala y de coordinación de decisiones: qué robot planifica su movimiento primero, qué trayectorias de los robots se convierten en obstáculos móviles para todos los demás, y qué heurísticas de búsqueda de trayectorias se aplican cuando cambian las condiciones.
Fundamentalmente, se trata de un problema en el que la intuición convencional —que cada robot debería tomar siempre la ruta más corta hacia su objetivo— suele resultar errónea.
Lo que aprendimos con el MIT
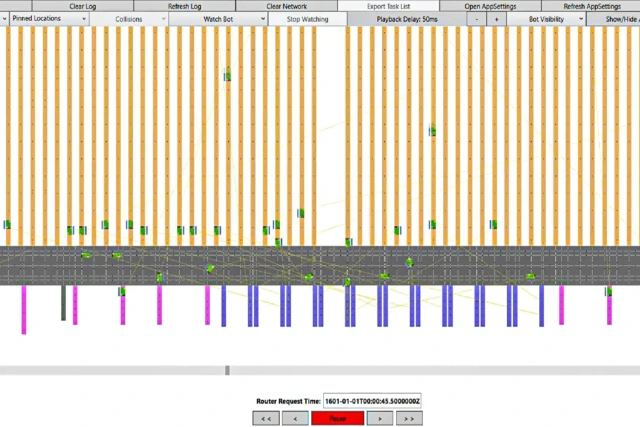
Una investigación publicada recientemente —llevada a cabo en parte por Brandon Araki y Jingkai Chen, de Symbotic, en colaboración con investigadores del MIT y publicada en la revista *Journal of Artificial Intelligence Research*— ilustra este punto. El artículo describe un método de aprendizaje por refuerzo que decide de forma activa qué robots tienen prioridad cuando una flota está replanteando sus trayectorias. La investigación comparó ese método con el uso de un orden de prioridad aleatorio por defecto en entornos simulados de almacenes densos. El equipo descubrió que la política de priorización activa mejoraba el rendimiento total en un 25 % de media. Y esa diferencia se ampliaba a medida que las condiciones de almacenamiento simuladas se hacían más densas y con pasillos más estrechos —exactamente las condiciones en las que operan nuestros robots—.
Resulta fascinante examinar las formas contrarias a la intuición en que este algoritmo de gestión de flotas logra un alto rendimiento. Por ejemplo, el software a veces ordenaba a un robot que se alejara de su objetivo para permitir que un robot de mayor prioridad atravesara un pasillo estrecho y, a continuación, reanudara su ruta una vez despejado el camino. A nivel local, eso parece una decisión errónea. A nivel global, entre cientos de robots que comparten un espacio finito, es en realidad la forma en que la flota mantiene un mayor rendimiento.
Esta perspectiva concuerda con la forma en que nuestro sistema de producción ya aborda la priorización. Cada caja de envío que nuestro sistema gestiona en un almacén tiene un plazo real, ya sea la salida de un camión de reparto o el plazo de entrega de un cliente. Esos parámetros proporcionan una estructura de prioridades natural: las cajas que deben trasladarse con mayor urgencia determinan a qué robots se les debe asignar una prioridad. Una vez que esos robots de alta prioridad han calculado las rutas más cortas, se convierten en obstáculos móviles que limitan tanto el espacio como el tiempo para todos los demás robots del sistema. Es una orquestación compleja en su máxima expresión.
El efecto sinérgico
La implicación estratégica es lo que denominamos una espiral positiva. Una coordinación más inteligente significa que se realiza más trabajo con menos robots. Menos robots en un espacio finito implican rutas de desplazamiento medias más cortas. Las rutas más cortas liberan volumen que puede volver al almacén, lo que aumenta la densidad. Una mayor densidad incrementa el valor de cada pie cúbico bajo el techo. Y esa misma coordinación inteligente que lo ha hecho posible se adapta a la escala del sistema.
Ese efecto multiplicador es precisamente la razón por la que Symbotic invierte en múltiples frentes a la vez. Una coordinación más inteligente del almacenamiento, la asignación de tareas y el enrutamiento es una de las dimensiones. También lo es la nueva tecnología de baterías Nyobolt que alimenta a nuestros SymBots, con una capacidad energética seis veces superior a la de la generación anterior. La mayor densidad energética permite un sistema que no necesita tiempos de inactividad dedicados a la recarga, lo que permite que cada robot realice más trabajo entre traspasos y mantenga bajos los tiempos totales de desplazamiento de la flota. Cada punto porcentual de eficiencia que conseguimos gracias a la inteligencia del software o a la capacidad del hardware se suma a todas las demás mejoras del sistema.
Por qué publicamos
Existe una vertiente de este sector en la que las empresas tratan los avances en investigación como secretos comerciales. Nosotros hemos tomado una decisión diferente. Colaboramos con instituciones de investigación de primer nivel, como el MIT, porque creemos que el camino para incorporar una mejor inteligencia física a la cadena de suministro puede acelerarse cuando la investigación se lleva a cabo de forma abierta.
¿Por qué la convergencia ahora?
Este reto ya no es teórico. Con la creciente adopción de sistemas automatizados de almacenamiento y recuperación y de la robótica en toda la cadena de suministro, la infraestructura básica está ahora lo suficientemente desarrollada como para que las empresas apliquen la IA física —no a máquinas individuales de forma aislada, sino a la coordinación de flotas enteras—.
El software cuenta ahora con potentes modelos de razonamiento dotados de sólidas capacidades multimodales. Ya es posible comprender los datos procedentes de miles de flujos. En los próximos años, asistiremos a una convergencia de capacidades con sistemas de última generación capaces de razonar en este contexto tan amplio, lo que permitirá alcanzar nuevos niveles de razonamiento, predicción y toma de decisiones adaptativa en entornos de almacén que son caóticos, dinámicos e imperfectos.
Los proyectos de infraestructura física tardan años en completarse. Las capacidades de IA de 2030 eclipsarán a las de 2026. Los líderes deben diseñar hoy sistemas de surtido que estén preparados a nivel de hardware para los «cerebros» de software del mañana —y en los que la unidad de inteligencia se mida a nivel de flota—.
El futuro del surtido es complejo. Las empresas que prosperen en él serán aquellas que incorporen inteligencia a flotas de máquinas conectadas que realicen un trabajo útil. Esa es la coordinación hacia la que nos dirigimos, y la investigación de la que nos enorgullece formar parte.
Contáctanos hoy mismo para concertar una demostración.
Actualizado: